Our Robots

RAPID REACT 2022 ROBOT
This year, we created two robots. One of the robots was made by our more senior members (Blue Team), while the other robot (Red Team) was to teach our younger members. Both robots succeeded in being fully designed, built, and programmed this year, which was another great first for our team. Though we could only compete remotely at Hueneme and Arizona this year, we are still very proud to have both our robots working and sent to the competition this year. Both can drive, intake, shoot, and climb, which is something our past robots haven’t been able to fully do. Overall, this year was a great achievement for our team.
INTRODUCING OUR TWO TEAMS:

BLUE TEAM

Our Blue Team Robot Code:
This is the first year using our FRC codebase in competition, along with falcon 500s for swerving. It’s the first year that all components — intake, indexer, shooter, and climber — were all fully coded and tested. Additionally, it’s also the first year we have a fully working autonomous program that isn’t only Taxiing. Our autonomous shoots the pre-loaded cargo, intakes the next closest cargo, and shoots again before Taxiing. The link above will take you to our code, which we’ve gotten to work with acceleration curves, PID, and self-made subsystems and commands. Like for the rest of the robot, programming has also made large strides.
Team:
| Tanisha Mehta |
| Ming Jin Yong |
| Alice Yang |
| Yohan Sakurai |
| Kaito Liventals |
| Rajveer Sidhu |
| Vayun Mathur |
| Zachary Kelly |
| Selin Kemiktarak |
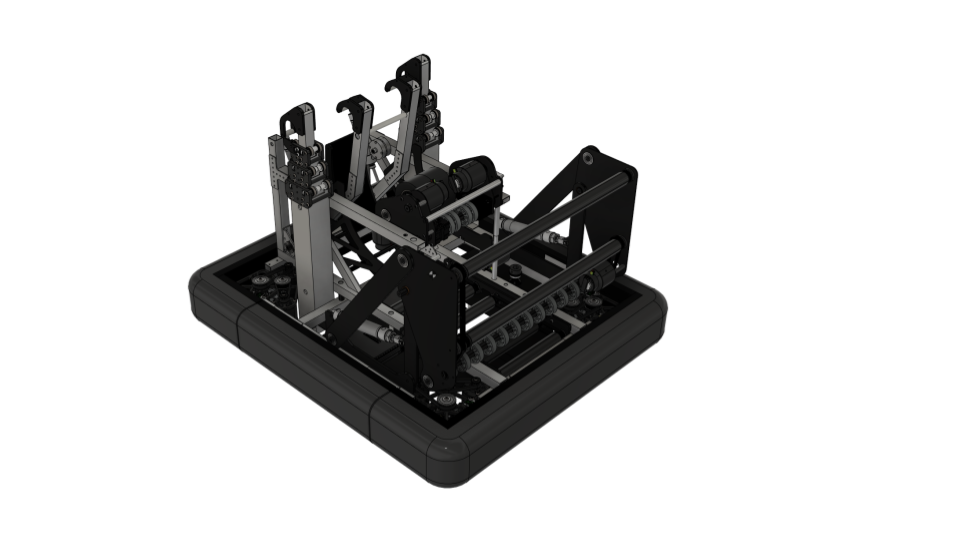
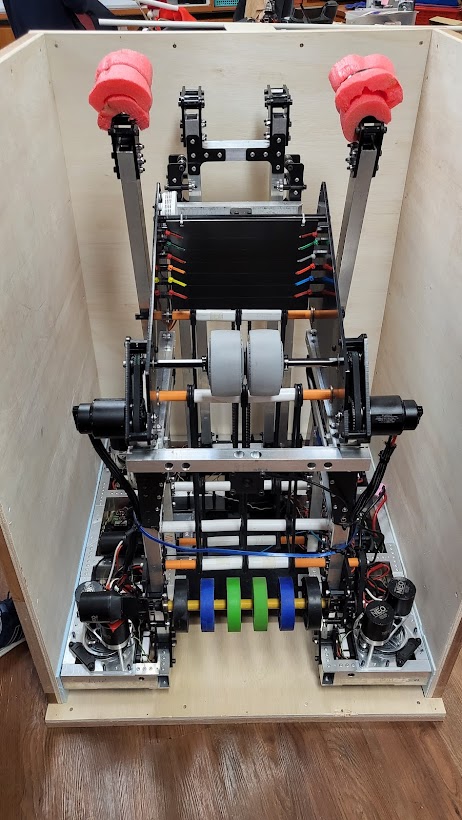
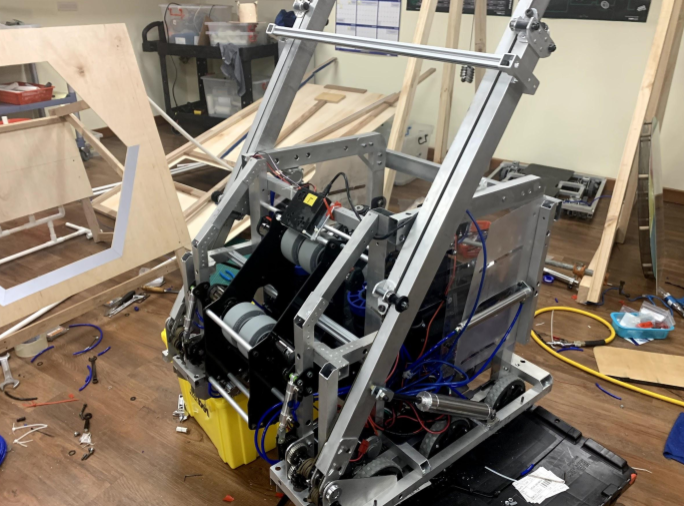
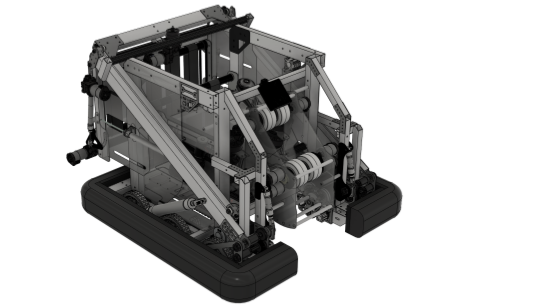
Our Blue Team Robot Design:
The design of this robot was based on minimalism and avoiding a tall bot. This was also the first year we got our robot coated, so there was an aesthetic factor as well.
After working on swerve robot projects since the summer of last year, we’ve fully implemented swerve modules in our drive base this year, so that our robot had the maximum maneuverability. The goal was to reduce cycle time.
The robot has a pneumatically extendable and retractable intake over the bumper, which intakes the cargo into the indexer. From there, the robot can shoot at the high hub when the robot is directly touching the lower hub. The shooter has a flywheel powered by falcons.
Regarding our climb, we have a three-stage climb to lift the robot up. In order to traverse to get more points, we also have a rotating climb arm that hooks the robot in place so the three-stage climb can reach the next bar.
Overall, this robot has been a culmination of many experiments in past seasons and during off-season.
RED TEAM
Our Red Team Robot Code:
With our FRC codebase in competition, and falcon 500s, it’s the first year that all components — intake, indexer, shooter, and climber — were coded and working for our members. We also successfully completed Taxiing in our autonomous. We were able to add limits to the elevator and rotational climb, which was successfully used in competition. The link above will take you to our code, with self-made subsystems and commands. This year was a great step for our team.
Team:
| Wilson Hou |
| Avery Fiore |
| Daniel Xu |
| Adam Brest |
| Aryan Pershad |
| Frank Xie |
| Asia Marcos |
| Akari Imai |
| Siddhant Gupta |
| Benjamin Turney |
| Jake Lee |
| Ella Chi |
| Emma Li |
| Julien Lim |
| Lauren Lim |
| Marcus Chin |
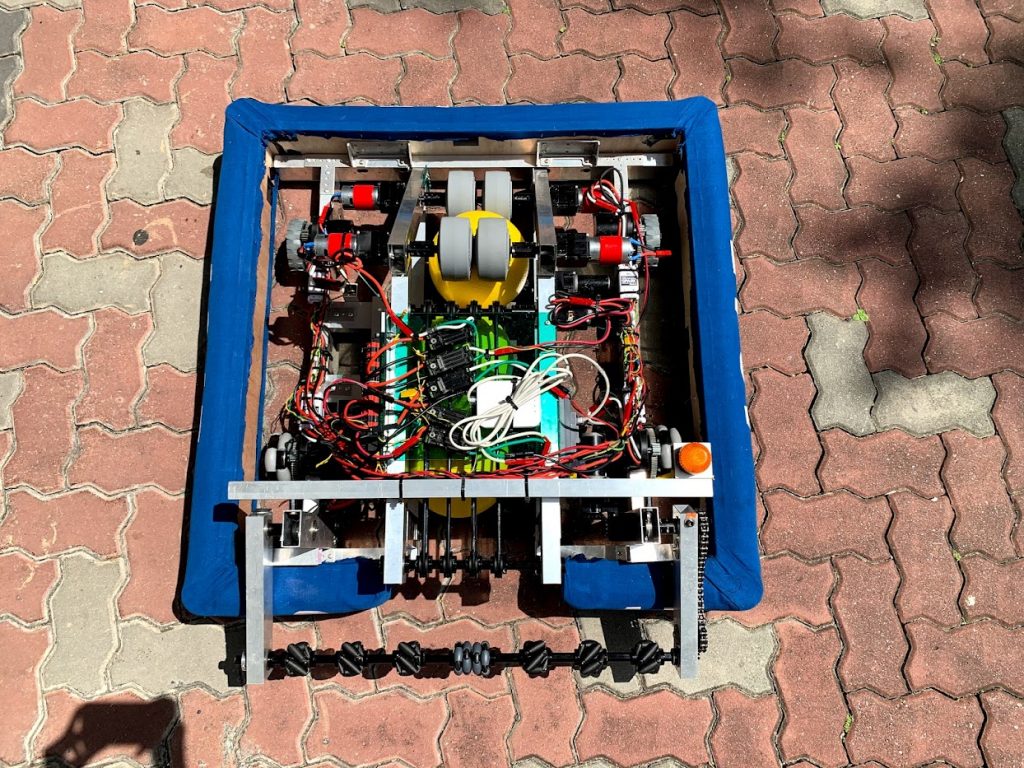
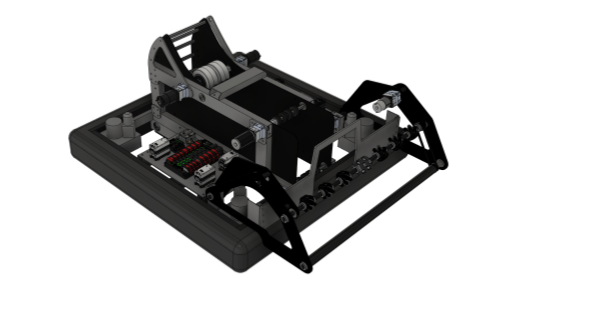
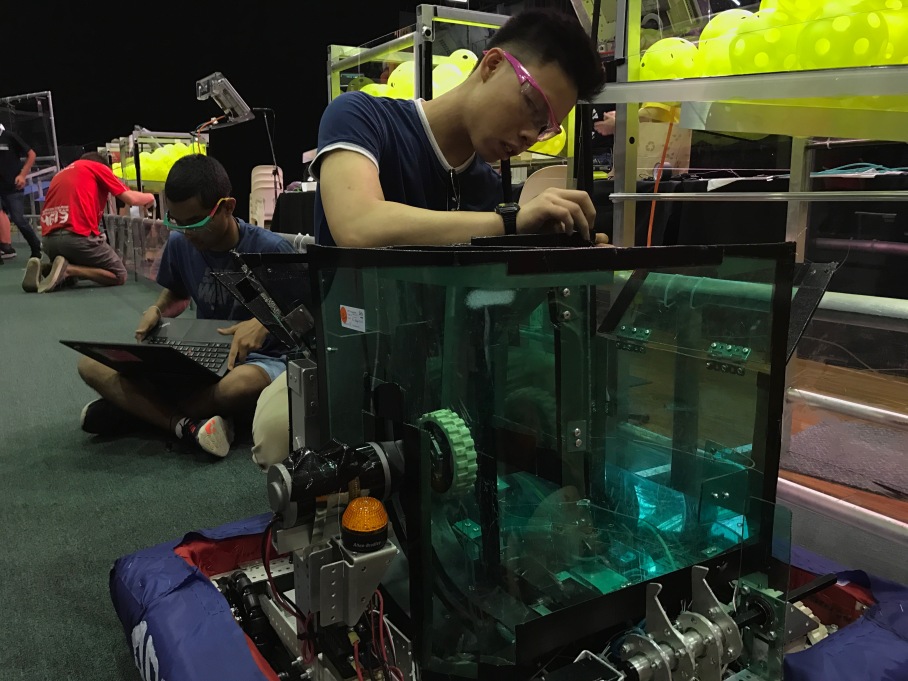
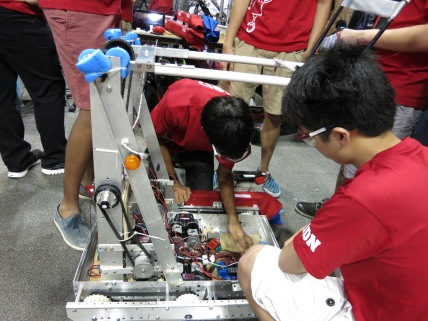
Our Red Team Robot Design:
Because of our many CAD members, we decided to split the robot into multiple parts so that everyone could get CAD experience. There was the drivebase, the hood, the shooter, the intake, the indexer, and the climb. All members worked to create the design this year, even non-CAD members through input on mechanical and eletrical feasibility.
Using the same swerve modules as during the summer, we got a fully working swerve drivebase. This meant that no matter what, we had a good defense and defendable robot. This made shooting much easier, due to faster time in reaching a fixed position.
The robot has an inline intake, which intakes the cargo directly into the indexer. The ball is transported upwards with polycord. From there, the robot can shoot at the high hub when the robot is outside the tarmac. The shooter has a flywheel powered by falcons.
Regarding our climb, we have a elevator climb to lift the robot up. In order to traverse bars, we also have a rotating climb arm that hooks the robot in place so the robot can reach the next bar.
We sent the robot, once completed, off to Arizona, where we suceeded in climbing, intaking, driving, and shooting. The video of one match is linked at the side. Though there were some parts that needed replacing, the design of the robot was an overall success.
PAST ROBOTS
2021: COVID’s Infinite Recharge
Even during the tough times of COVID, we completed this robot!
2020: Infinite Recharge
This is our robot for Infinite Recharge.

2019: Deep Space

- FIRST World Championship in Detroit
- Southern Cross Regional
- 6th Alliance in Playoffs
- Won Safety Award sponsored by Underwriters Laboratories
- Won Engineering Inspiration Award
- Won Dean’s List Finalist (Captain Rohit Narayanan)

2018: Power Up

- Southern Cross Regional
- Won Runner-Up Safety Award sponsored by Underwriters Laboratories
2017: Steamworks

- Qualified 5th at Southern Cross Regional

2016: Stronghold

- Competed at Australia Regional
2014: Aerial Assist

- Competed in Hawaii Regional

2013: Ultimate Ascent
- Competed in Greater Toronto West Regional